购物车中还没有商品,赶紧选购吧!
购物车中还没有商品,赶紧选购吧!
对于自动驾驶激光雷达而言,测距距离足够远、测距精度足够高,是保证自动驾驶系统及时作出判断的前置条件。前面也提到测距距离取决于激光器的功率,而测距精度,则取决于高速ADC芯片的采样频率。
目前主流的激光雷达都采用ToF的测距方式,ToF也就是飞行时间(Time of Flight),通过直接测量发射激光和回波信号的时间差计算出距离信息。激光器先发射出经过编码的激光,激光到达被测物体后,接收器再接收被测物体反射回来的激光,由于光速基本固定,所以可以计算从发出激光到接收到激光的时间差,利用s=v/t计算出这段时间内光传播的距离,再除以2得出被测物体与激光雷达之间的距离。
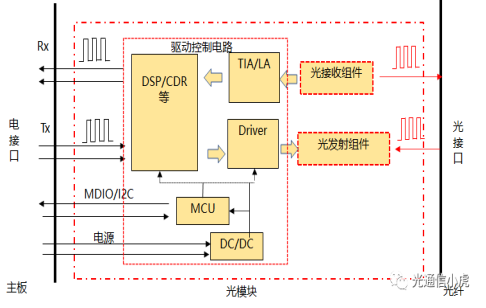
在激光雷达中高速ADC芯片,接收器接收到的信号,需要通过模拟前端进行放大以及通道选通,再由ADC将模拟信号转换成数字信号。因此,ToF测距激光雷达的测距精度,就直接取决于ADC的采样频率。
以采样速率为1GSPS(Gigabit Samples Per Second,即每秒千兆次采样)的ADC为例,它的时钟周期为1ns。已知光速C一般取值为300000km/s,所以在采样速率1GSPS的ADC中,每个时钟周期,也就是每1ns的采样周期里光传播距离为30cm。因此,考虑到计算距离需要将这段时间内光传播的距离除以2,那么也就是说采样速率为1GSPS时可以达到正负15cm的精度。
根据techinsights对Velodyne的VLP-16激光雷达的拆解,BOM成本大约为830-990美元,其中由于是机械旋转结构,16线需要有16组激光器和接收器,成本占大头;而其他主要元件里,Altera的FPGA和TI的高速ADC08500占比较高,分别为14美元和30美元。从TI官网可以查到,ADC08500是一颗8bits、500MSPS采样率的高速ADC,当然Velodyn这款激光雷达也是相对较早期的产品了。
目前市场上激光雷达应用中,比较常见采用的是TI的ADC08D1000,这是一颗8bits、支持双路1GSPS或单路2GSPS的高速ADC芯片,兼顾低功耗和高性能。
而激光雷达的另一种测距方式,FMCW(调频连续波)通过将发射激光的光频进行线性调制,将回波信号与参考光进行相干得到频率差,从而获得飞行时间反推目标物体距离。FMCW激光雷达具有可直接测量速度信息以及抗环境光和其他激光雷达干扰等优势,但由于采用多通道并行处理,数据量大,对高速ADC转换速率(最大采样速率)的要求是ToF系统的2-4倍。