购物车中还没有商品,赶紧选购吧!
购物车中还没有商品,赶紧选购吧!


 量产
量产
特性
Motion controller
- Motion profile calculation in real-time
- On the fly alteration of motor parameters (e.g. position, velocity, acceleration)
- High performance microcontroller for overall system control and serial communication protocol handling
Encoder
- sensOstep magnetic encoder (max. 1024 increments per rotation) e.g. for step-loss detection under all operating conditions and positioning supervision
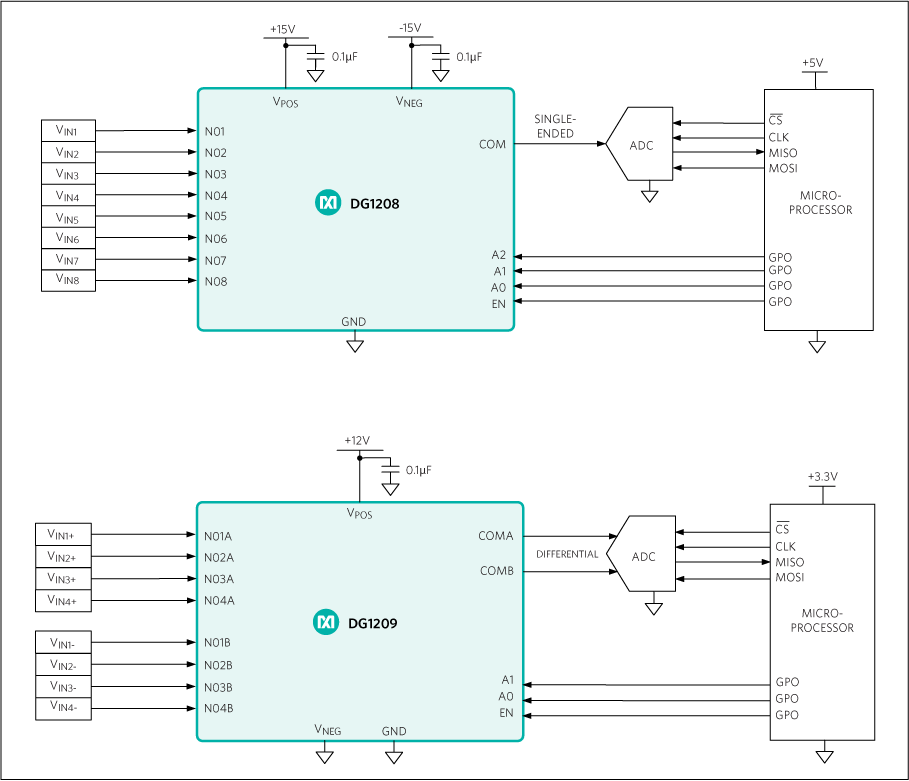
Interfaces
- inputs for stop switches (left and right) and home switch
- 2 analog inputs
- 2 general purpose outputs (open collector with freewheeling diodes)
- USB, RS485 communication interfaces
Bipolar stepper motor driver
- Up to 256 microsteps per full step
- High-efficient operation, low power dissipation
- Dynamic current control
- Integrated protection
- stallGuard2 feature for stall detection
- coolStep feature for reduced power consumption and heat dissipation
Software: TMCL
- standalone operation or remote controlled operation,
- program memory (non volatile) for up to 2048 TMCL commands, and
- PC-based application development software TMCL-IDE available for free.
Electrical and mechanical data
- Supply voltage: +24V DC nominal
- Motor current: up to 6.5A RMS (programmable)
产品详情和应用
The TMCM-1181 is a single axis stepper motor controller/driver module for sensorless load dependent current control. The device is powered by ADI Trinamic StallGuard2™, CoolStep™ and SpreadCycle™ chopper technology and has a trapezoidal ramp generator. The TMCM-1181 is capable of driving up to 9A of current from each output (with proper heatsinking). It is designed for an operating voltage of 11 to 28V. The device provides a RS485, USB and GP-in interface. An integrated protocol processor supplies a high level TMCL communication.
All you need to get started is a power supply and ADI Trinamic's free and easy to use TMCL-IDE. This graphical user interface allows quick setup and supports the use of commands in direct mode, monitors real-time behavior visualized in graphs, and logs and stores data.