购物车中还没有商品,赶紧选购吧!
购物车中还没有商品,赶紧选购吧!
磁编码器芯片工作原理:
当电流通过一个位于磁场中的导体的时候,磁场会对导体中的电子产生一个垂直于电子运动方向上的的作用力,从而在垂直于导体与磁感线的方向上产生电势差。
如果让施加在这个导体上的磁场以电流流经路径为轴线,按照上图箭头所示的方向旋转,那么这个霍尔电势差就会因为磁场与导体之间角度的改变而发生变化,而这个电势差的变化趋势,与之前一文中次级线圈旋转时的输出电压一样,是一条正弦曲线。因此,基于这个通电导体两侧的电压,就可以反推计算出磁场旋转的角度了。
这就是磁编码器测量旋转位置反馈时的基本工作机理了。测量的旋转位置通过霍尔传感器进行放大和转化.
磁性编码器上用的霍尔传感器(芯片),一般都有着极高的集成度,不仅将霍尔半导体元件和相关的信号处理和调节电路整合在一起,同时还可以集成各种不同类型的信号输出模块,例如:正余弦模拟量信号、方波数字电平信号或者总线通讯输出单元。
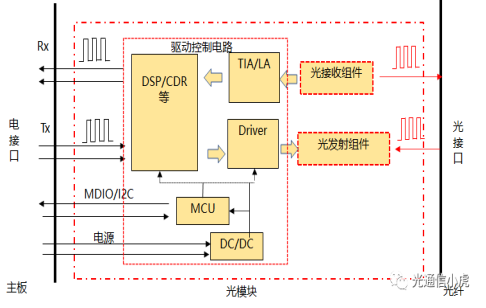
磁编码器构成:
磁编码器依赖于三个主要组件:磁盘,传感器和调节电路。磁盘已磁化,其圆周上有许多磁极。传感器检测磁盘旋转时磁场的变化,并将此信息转换为正弦波。传感器可以是感应电压变化的霍尔效应器件,也可以是感应磁场变化的磁阻器件。调节电路对信号进行倍增,分频或内插以产生所需的输出。
磁编码器分类:
磁编码器的分类和光电编码器的分类类似,主要有增量式和绝对值式,其中绝对值式分单圈绝对值和多圈绝对值。
增量式磁编码器:
磁编码器的分辨率取决于磁盘周围的磁极数和传感器的数量。输出相对位置。
绝对值式磁编码器:
绝对值式磁编码器为每个测量位置分配了唯一的二进制代码或字。即使断电,这也使他们能够跟踪编码器的确切位置。
KIT磁编码器:
磁性编码器另一个经常被大家诟病的缺点,就是其较慢的响应速度,不能胜任高速运动负载的位置反馈,加上它(相对光学编码器)较低的精度和分辨率,磁性编码器一直被认为不太适合作为伺服电机内的集成位置反馈元件;此外,作为伺服编码器,还有一个必须要解决的问题,就是多圈位置反馈...
KIT磁编码器是德国posital fraba公司生产的一个系列的产品,提供智能,免维护(无需更换电池)高性价比的解决方案在最具挑战性的运动反馈应用中。
将韦根多圈技术融入到多圈空心轴通孔绝对值编码器中,提供了无需电池的多圈绝对值编码器,并且是通孔空心轴的解决方案。
编码器内部无需齿轮,外形紧凑,并且高性价比的概念,是集成到伺服,步进电机和各种机器人关节机械臂的理想的解决方案。
磁编码器优缺点:
优点:磁性编码器的最大优势可能是其坚固性。与光学编码器不同,磁性版本对灰尘,污垢,液体和油脂等污染物以及震动和振动不敏感。与光学编码器类似,磁性编码器确实需要在磁盘和传感器之间留有气隙。但是,磁性编码器中的气隙不需要像光学编码器那样清洁和透明。只要在磁盘和传感器之间不存在任何含铁材料,就会检测到电磁脉冲。磁编码器正确运行的两个重要规范是传感器相对于磁盘(或磁带)的径向位置以及传感器与磁体之间的间隙距离。
缺点:容易受到电磁干扰、需要采取补偿和保护措施避免温度漂移...
Posital磁编码器在众多方面取得了重大的进展:在众多品牌的磁编码器中,进口posital品牌对磁编码器产品的生产,进行了多方面的重大改进,使posital磁编码器在很多领域都可以得到广泛应用,产品线也非常丰富;
●posital磁编码器在克服磁编码器易受干扰方面,采用新技术,特别是采用32位比特微处理器,可以完成复杂的信号处理;
●结合自身定制的霍尔传感器,带来了媲美光电编码器的分辨率和精度,并使存取时间缩短到几微秒;
●通过无电池多圈技术,解决了多圈位置无法反馈的问题,同时还无需更换电池。
磁编码器应用案例:
相比传统的光学编码器,磁性编码器不需要有复杂的码盘和光源,元器件数量更少,检测结构更加简单;同时,霍尔元件本身也具有许多优点,例如:结构牢固、体积小、重量轻、寿命长,耐震动,不怕灰尘、油污、水汽及盐雾等的污染或腐蚀...等等。磁性编码器在使用时也有着相对比较高的可靠性,结实、耐用,适合应用在一些比较恶劣的设备环境中,如风电、工程机械领域...等等。
案例一:posital磁编码器可以应用于电机的旋转位置反馈,将编码器的永磁体直接安装在电机轴的末端,从而省去了用传统反馈编码器时所需的过渡联接轴承(或联轴器),做到无接触式的位置测量,这样就降低了电机运行过程中因机械轴振动而造成编码器失效(甚至损坏)的风险,有助于提升电机运行的稳定性。
应用案例二:伺服电机是一种旋转电机,可以精确控制角度位置、速度和加速度。它由一个合适的电机和一个位置反馈传感器组成。它还需要一个相对复杂的控制器,通常是专门为伺服电机设计的专用模块。
电刷直流电机是最简单的伺服电机形式。电动机的结构式转子上有铜绕组,定子上有永磁体。转子上的绕组通电,形成旋转磁场,旋转磁场又使转子上的绕组旋转。为了使电机产生旋转磁场,转子电流必须切换到相邻的线圈或绕组。这是通过电刷刷上位于电机转子的整流段。当转子旋转时,不同的线圈通过电刷和整流段通电。通过在直流电机的尾轴加装编码器,如KCD绝对值Kit编码器,它可以用于一个伺服控制回路,称为直流伺服电机。无刷直流电机的缺点是,它们需要霍尔效应传感器或带有“霍尔轨迹”的编码器产生某种形式的相位信号。这些信号反馈转子位置数据到电机驱动器,这样驱动器就可以调节通过定子绕组的电流从而调节旋转磁场的强度。随着高性能、低成本的磁性多圈绝对值编码器的出现,如POSITAL的KCD系列,驱动器正在从传统的“相位轨迹”转到使用绝对值编码器的位置信息来调节无刷电机的相位电流。利用绝对值编码器的反馈,编码器的位置信息可用于电机相位和伺服回路位置控制。